 GitHub
GitHub YouTube
YouTubeMotor Control University
Field Oriented Control (FOC)
Field Oriented Control (FOC), introduced by F. Blaske in 1972 (Blaschke1972), is one of the most common control law in practice, when fine control of machine torque is required. The three-phase sinusoidal model in the fixed reference frame \(abc\), is projected into the fixed two-phase reference frame \(\alpha\beta,\) using the Clarke Transformation and then into the rotating reference frame \(dq\) using the Park transformation. The Park transformation is generally used, as it results in constant phase voltages and currents (instead of high-frequency variant variables). In addition, the model highlights the role of the \(i_q\) quadrature current in torque generation. Unlike six-step control, this type of control requires a good knowledge of the \(\theta\) position of the motor shaft.
In the literature, PMSM control has been the subject of a large number of publications. Here are some examples:
- (Bodson1993) proposes a state feedback approach with feedback linearization,
- (Sira2000) highlightes flatness for PMSM,
- (Glumineau2015) the book provides a review of sensorless control,
- (Chiasson1993) proposes nonlinear adaptive control,
- (Utkin1999) deals with sliding mode control.
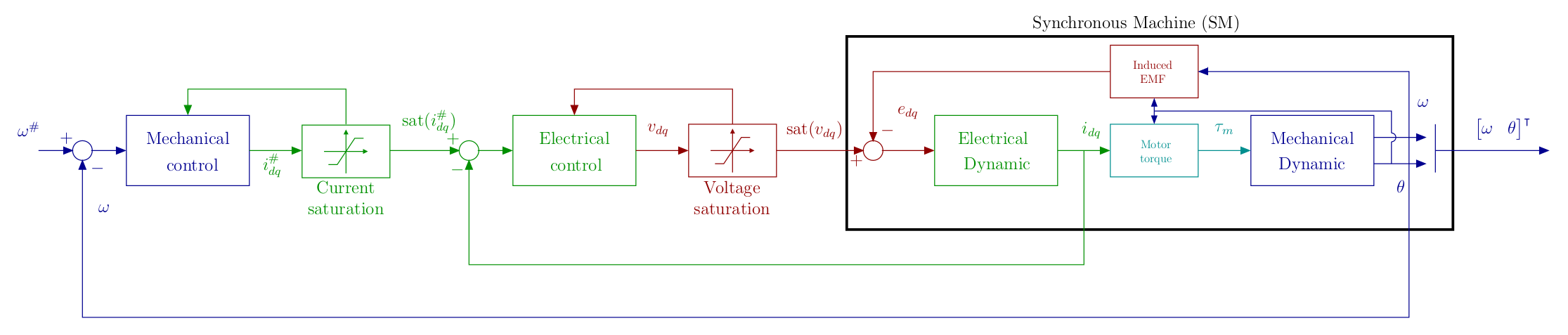
Although not exhaustive, this list provides an overview. The figure below given a scheme of the control strategy.
This chapter is divided into 5 sections:
Modulation : Sine v.s. Space Vector
Transformations : Clarke and Park
Dynamic control strategy
Saturations management
Field-weakening


References
(Blaschke1972) Blaschke, F. (1972). The Principle of Field Orientation as Applied to the New Transvector Closed-Loop System for Rotating-Field Machines. Siemens Review, 34(3), 217–220.
(Bodson1993) Bodson, M., Chiasson, J.-N., Novotnak, R.-T., & Rekowski, R.-B. (1993). High performance nonlinear feedback control of a permanent magnet stepper motor. IEEE Transactions on Control Systems Technology, 1(1), 5–14. https://doi.org/10.1109/87.221347
(Chiasson1993) Chiasson, J.-N., & Novotnak, R.-T. (1993). Nonlinear speed observer for the PM stepper motor. IEEE Transactions on Automatic Control, 38(10), 1584–1588. https://doi.org/10.1109/9.241582
(Glumineau2015) Glumineau, A., & de Leon Morales, J. (2015). Sensorless AC Electric Motor Control (Advances i). Springer International Publishing. https://doi.org/10.1007/978-3-319-14586-0
(Sira2000) Sira-Ramírez, H. (2000). A Passivity plus Flatness Controller for Permanent Magnet Stepper Motor. Asian Journal of Control, 2(1), 1–9. https://doi.org/10.1111/j.1934-6093.2000.tb00139.x
(Utkin1999) Utkin, V.-I., Guldner, J., & Shi, J. (1999). Sliding Mode Control in Electromechanical Systems. Taylor & Francis.