GitHub
GitHub YouTube
YouTubeMotor Control University
Getting Started
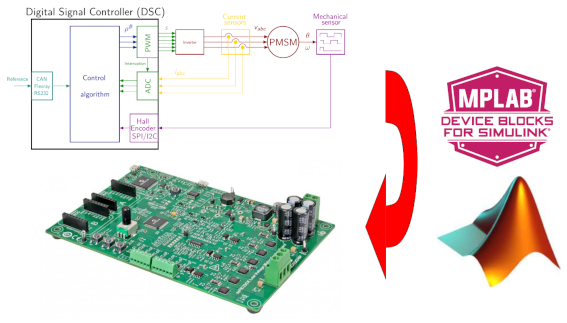
This video is the first in a series about rapid control prototyping for electric motors. The objective is to show that the use of matlab/simulink, and mplab device block for simulink, facilitates the implementation of real time advanced control strategies for electric motor. Here we present the first steps towards the implementation of a vector control law.
Support of the presentation
The support of the presentation is available online:

Simulink model
The simulink model and a tutotiral to use the model is available on Github